Delfi-REAL
Delfi-REAL was the result of the design synthesis project done at Delft University of Technology. In groups of ten, students spent 3 months going through a full mission design cycle together to complete their bachelor's degree in Aerospace Engineering.
2019
Awarded first prize at Symposium Design and Synthesis Exercise Jan 2019 - Delft University of Technology Faculty of Aerospace Engineering
The Mission
More than ten years ago, the nano satellite Delfi-C3 was launched. To this day, it is still operational completing orbit after orbit. Over the years of course some of its systems started to show signs of degradation. For this reason, the ‘The Return of the Queen’ mission was initiated. A mission which would be able to safely return Delfi-C3 back to Earth. To fulfil this mission, Delfi-REAL (Re-Entry And Landing) was designed, a cubesat with a clamp on board which is able to grab Delfi-C3, perform a de-orbit maneuver, protect it during the violent re-entry and safely land.
FIRST STEP:
DESIGN OPTIONS

System Concepts
The range of viable subsystem design options could be combined in a single system in multiple ways. Multiple design options were considered, resulting in a variety of system concepts. The first concept was based on an expanding foam based shell to trap and protect the target. A second design was based on two different modules jointly creating a rail, which could be tightened securely. A more resuable concept would be creating a nano satellite sized space shuttle. Different types of direct attachment and capture approaches were considered and finally, a modular nano satellite swarm design was proposed.
SECOND ITERATION:
COMBINING CONCEPTS

Trade-Off
Analysis showed that the rigid shell and clamp concepts performed best at different critical mission stages. Their defining subsystems were not incompatible with each other, and were therefore combined into a new design concept. This new concept uses a clamp to secure Delfi-C3 and encapsulates it with four rigid walls. Within these walls, Delfi-C3 would be protected from vibrations, heat and impact during re-entry.
DETAILED CONCEPT

Internal Configuration
In the detailed concept the spacecraft can be seen using an integrated heat shield and the main propulsion system is located on the sides of the system. The use of Attitude Determination and Control System (ADCS) thrusters on each corner allows for manoeuvrability, and the centre of the spacecraft is available for the clamp system.
CAPTURE:
CLAMPING DEVICE
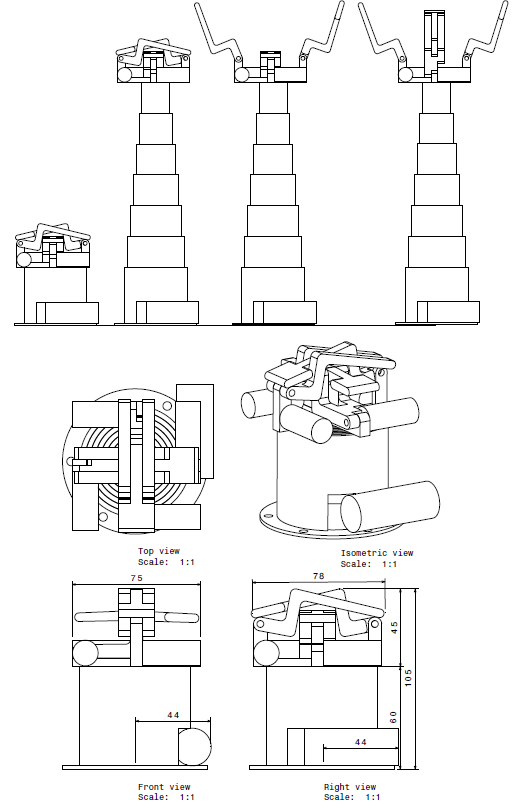
Capturing Spinning Non-cooperative Target
The main challenge of the mission is that a capture has to be made of a non-cooperative and uncontrolled target. A clamp was designed which would be able to grab Delfi-C3 and retract it to the safe position within the foldable walls. To be able to do this Delfi-REAL has to approach the target and match its rotational velocity. To verify the capabilities of the control and propulsion system a simulation was done. This simulated the two phases, first the approach maneuver and secondly the rotation matching. Spacecraft path is in blue, the target is the green sphere.
SIMULATION:
APPROACH AND ROTATION MATCHING

Getting Back Down
The second challenge of the mission is to bring back it back down to Earth. It consists of an ablative heat shield and a drogue + main parachute combination. The designed thermal protection system is using a phenolic novolac resin impregnated 3D fine-woven pierced carbon fabric composite.
RE-ENTRY
HEATSHIELD AND PARACHUTE

Final Design
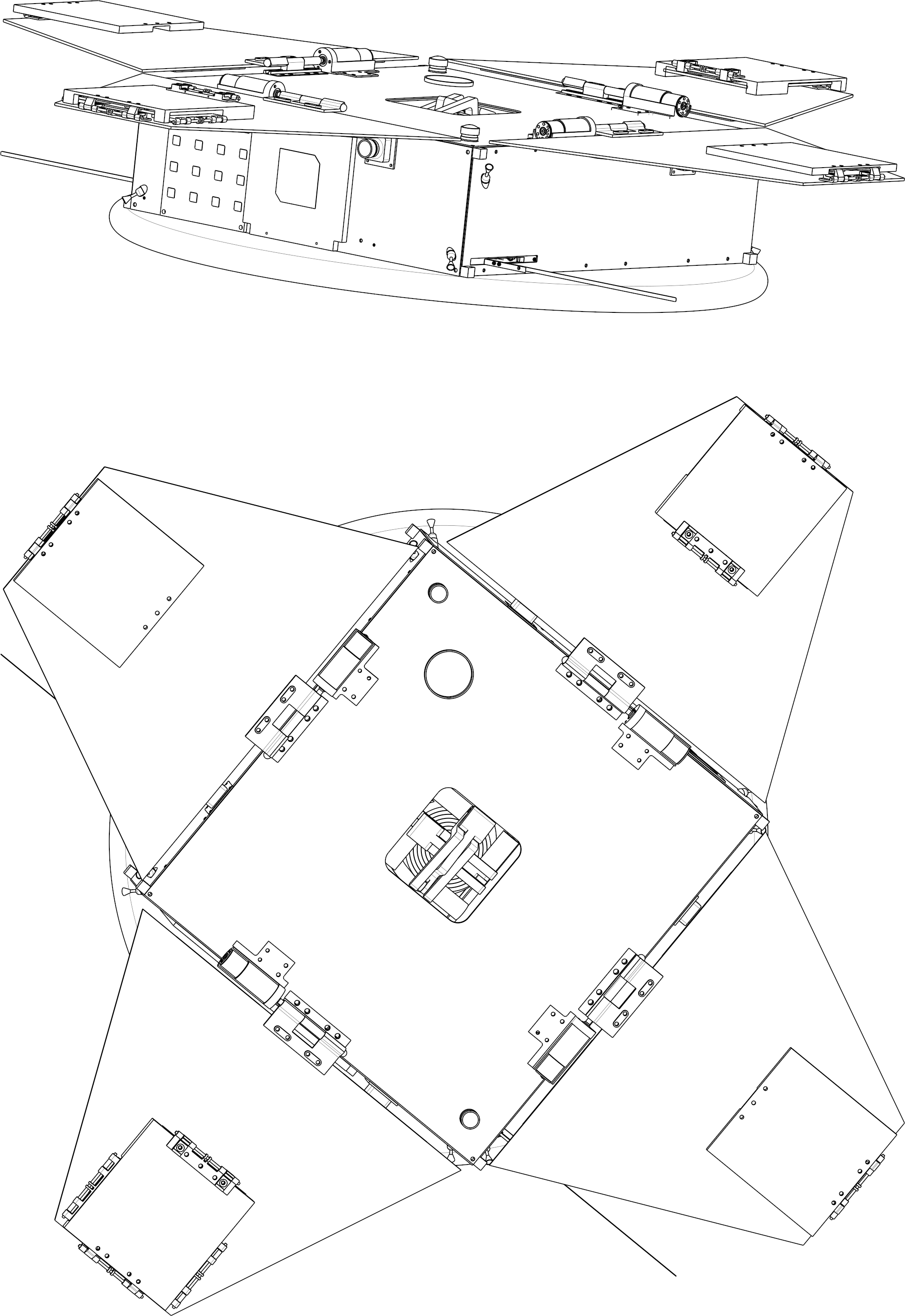
The rest of the subsystems: power, telemetry and communications, command and data handling and structural design were developed and could be combined in one final design. The large foldable panels are used to enclose and protect Delfi-C3 during re-entry and serve as main surface area for solar cells.
DELFI-REAL DESIGN
CLOSED PANELS
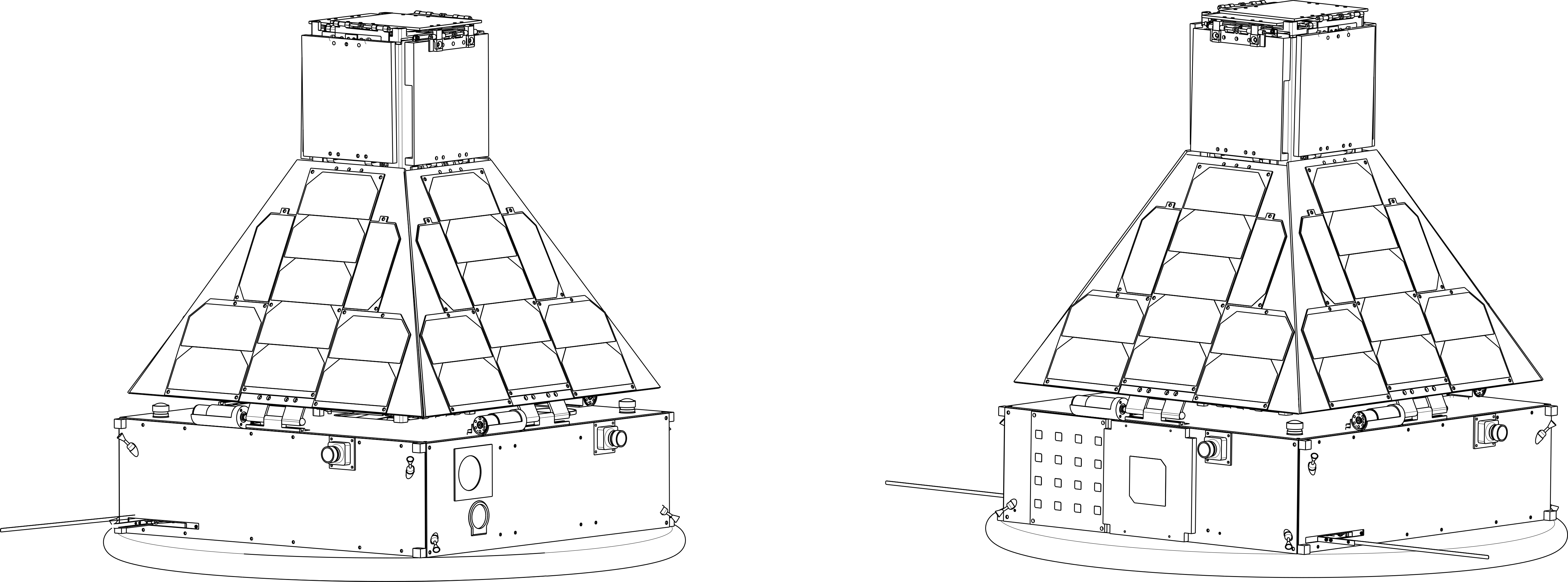
OPEN PANELS